Real time people detection combining appearance and depth image spaces using boosted random ferns
Real time people detection combining appearance and depth image spaces using boosted random ferns
Abstract
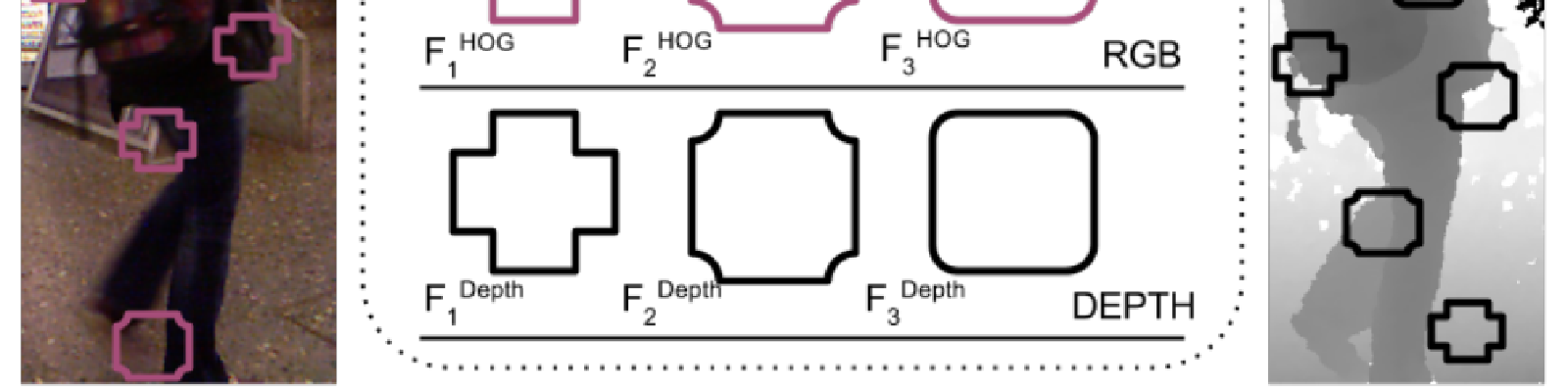
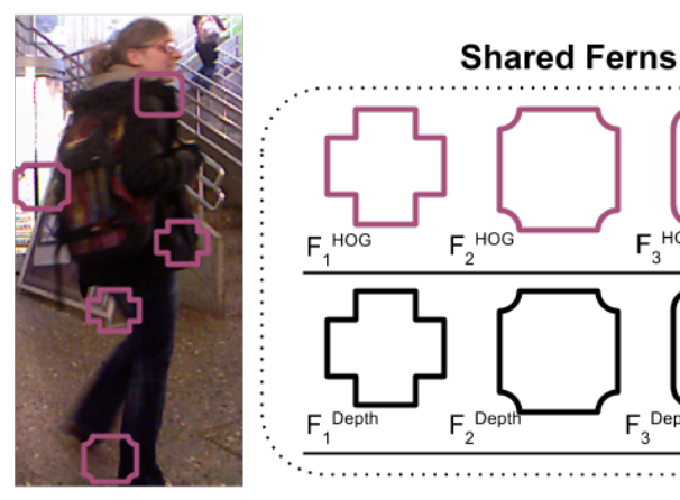
This paper presents a robust and real-time method for people detection in urban and crowed environments. Unlike other conventional methods which either focus on single features or compute multiple and independent classifiers specialized in a particular feature space, the proposed approach creates a synergic combination of appearance and depth cues in a unique classifier. The core of our method is a Boosted Random Ferns classifier that selects automatically the most discriminative local binary features for both the appearance and depth image spaces. Based on this classifier, a fast and robust people detector which maintains high detection rates in spite of environmental changes is created. The proposed method has been validated in a challenging RGB-D database of people in urban scenarios and has shown that outperforms state-of-the-art approaches in spite of the difficult environment conditions. As a result, this method is of special interest for real-time robotic applications where people detection is a key matter, such as human-robot interaction or safe navigation of mobile robots for example.

Acknowledgements: This work has been partially funded by the EU project CargoANTs FP7-SST-2013-605598 and the Spanish CICYT project DPI2013- 42458-P.
