Filter by type:
Improving Map Re-localization with Deep ‘Movable’ Objects Segmentation on 3D LiDAR Point Clouds
We propose the use of a deep learning architecture to segment movable objects from 3D LiDAR point clouds in order to obtain longer-lasting 3D maps. This allows for better, faster and more accurate …
In ITSC,
2019

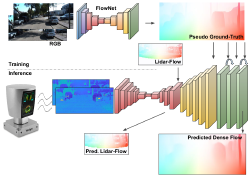
Hallucinating Dense Optical Flow from Sparse Lidar for Autonomous Vehicles
We propose a novel approach to estimate dense optical flow from sparse lidar data acquired on an autonomous vehicle. This is intended to be used as a drop-in replacement of any image-based optical …
In ICPR,
2018
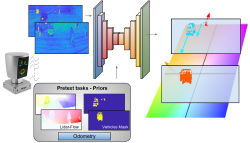
Deep lidar CNN to understand the dynamics of moving vehicles
We propose a novel solution to understand the dynamics of moving vehicles of the scene from only lidar information. The main challenge of this problem stems from the fact that we need to disambiguate …
In ICRA,
2018
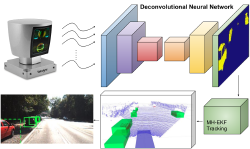
Deconvolutional Networks for Point-Cloud Vehicle Detection and Tracking in Driving Scenarios
We introduce a novel CNN-based vehicle detector on 3D range data. The proposed model is fed with an encoded representation of the point cloud and computes the probability for each 3D point of …
In ECMR,
2017
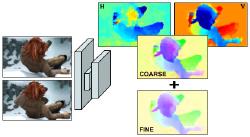
Joint Coarse-and-Fine Reasoning for Deep Optical Flow
We propose a novel representation for dense pixel-wise estimation tasks using CNNs that boosts accuracy and reduces training time, by explicitly exploiting joint coarse-and-fine reasoning. The coarse …
In ICIP,
2017
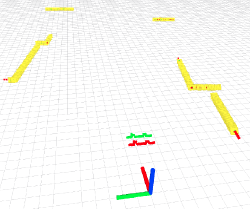
Low resolution lidar-based multi-object tracking for driving applications
We explore the possibilities of Deep Learning (DL) methodologies applied to low resolution 3D lidar sensors such as the Velodyne VLP-16 (PUCK), in the context of vehicle detection and tracking. For …
In ROBOT,
2017

Low cost, robust and real time system for detecting and tracking moving objects to automate cargo handling in port terminals
We address the problem of Detecting and Tracking Moving Objects (DATMO) for autonomous cargo handling in port terminals using a single layer laser scanner. The system has been evaluated with real data …
In ROBOT,
2015
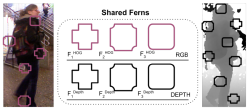
Real time people detection combining appearance and depth image spaces using boosted random ferns
This paper presents a robust and real-time method for people detection in urban and crowed environments. The core of our method is a Boosted Random Ferns classifier that selects automatically the most …
In ROBOT,
2015