Improving Map Re-localization with Deep ‘Movable’ Objects Segmentation on 3D LiDAR Point Clouds
Improving Map Re-localization with Deep ‘Movable’ Objects Segmentation on 3D LiDAR Point Clouds
Abstract
Localization and Mapping is an essential component to enable Autonomous Vehicles navigation, and requires an accuracy exceeding that of commercial GPS-based systems. Current odometry and mapping algorithms are able to provide this accurate information. However, the lack of robustness of these algorithms against dynamic obstacles and environmental changes, even for short time periods, forces the generation of new maps on every session without taking advantage of previously obtained ones. In this paper we propose the use of a deep learning architecture to segment movable objects from 3D LiDAR point clouds in order to obtain longer-lasting 3D maps. This will in turn allow for better, faster and more accurate re-localization and trajectory estimation on subsequent days. We show the effectiveness of our approach in a very dynamic and cluttered scenario, a supermarket parking lot. For that, we record several sequences on different days and compare localization errors with and without our movable objects segmentation method. Results show that we are able to accurately re-locate over a filtered map, consistently reducing trajectory errors between an average of 35.1% with respect to a non-filtered map version and of 47.9% with respect to a standalone map created on the current session.

Paper Summary
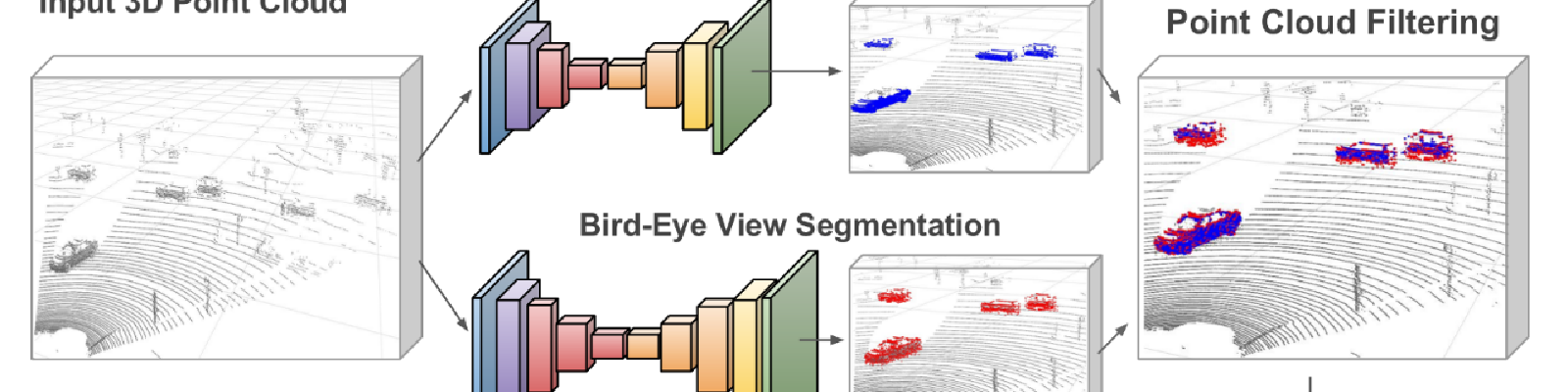
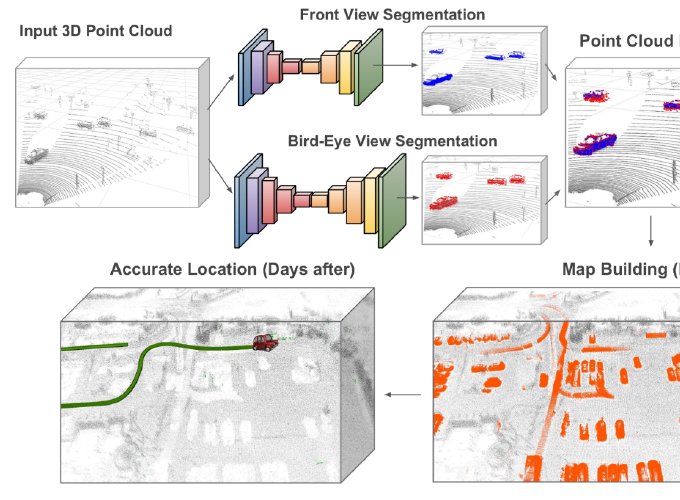
In this paper we propose the creation of longer lasting 3D LiDAR maps with state of the art localization and mapping algorithms by eliminating from the source the possible dynamic components of the scene. For that, we take advantage of deep learning techniques and introduce the use of two different convolutional neural networks which, having respectively as input a front and a bird’s eye view projections of the 3D LiDAR point cloud, segment the movable objects from the scene. To demonstrate our approach, we build 3D maps of a very dynamic environ- ment such as a parking lot with and without our segmentation applied and use it to assist for locating ourselves at different times and days, showing a consistent reduction of the average trajectory estimation error. Moreover, we show how our approach can also be employed for building a full map of an area covered in several days.
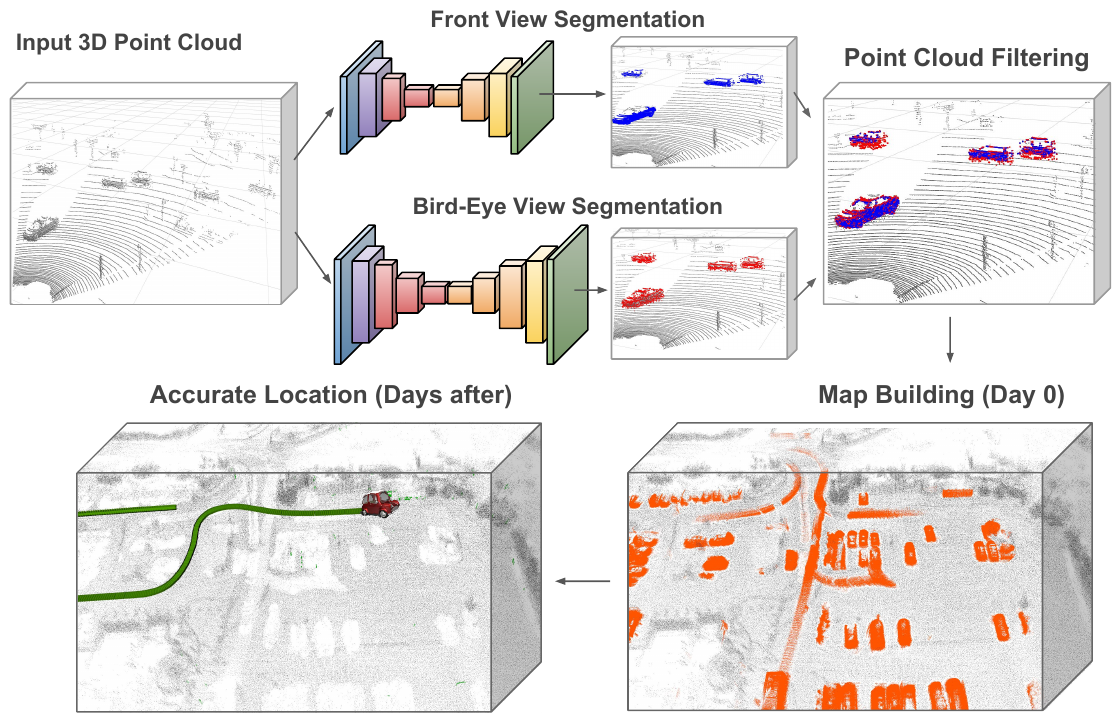
We propose to segment movable objects from 3D LiDAR point clouds to build longer lasting maps that can assist on trajectory estimation for subsequent days. For that we employ two deep networks processing respectively a front and a bird’s eye view projection of the LiDAR input frames. By retaining mostly static elements on the scene, we are able to accurately estimate our position and trajectory on subsequent days by additionally re-localizing on the map.
Approach
The main objective of this paper is to demonstrate how, by pre-filtering possibly moving objects from the scene, we are able to accurately locate during longer periods of time in standard 3D maps such as the ones generated with common SLAM or LiDAR odometry and mapping (LOAM) algorithms. Our approach has two main modules, which are detailed in this section: A) deep-learning based segmentation of movable objects in 3D LiDAR point clouds; B) accurate re-localization at different days over a map built from a cluttered dynamic scenario using standard LeGO-LOAM algorithm. This can also be employed to build a full map over several days or in a multi agent way.
Movable Objects Segmentation

We model the moving objects segmentation task as a refined encoder-decoder architecture. As the inputs are quite big (500 × 600) we apply five contractive and five expansive levels. To get richer features at each level, we insert customized fire modules that capture local and context information from the previous feature maps. These modules first reduce the number of feature channels and apply two parallel sets of convolutional filters on them to finally concatenate the results, obtaining local and context aware features. Intermediate losses are computed in this network, merging predictions at different resolutions.
Vehicle Localization
To locate inside an already built map our system uses just Velodyne LIDAR data and, if available, information from low-cost car GPS. We first create a ground truth map at day zero against which we aim to locate on the subsequent days. Then we detail our localization approach, which consist on obtaining an coarse initial guess followed by the final accurate localization (see paper).
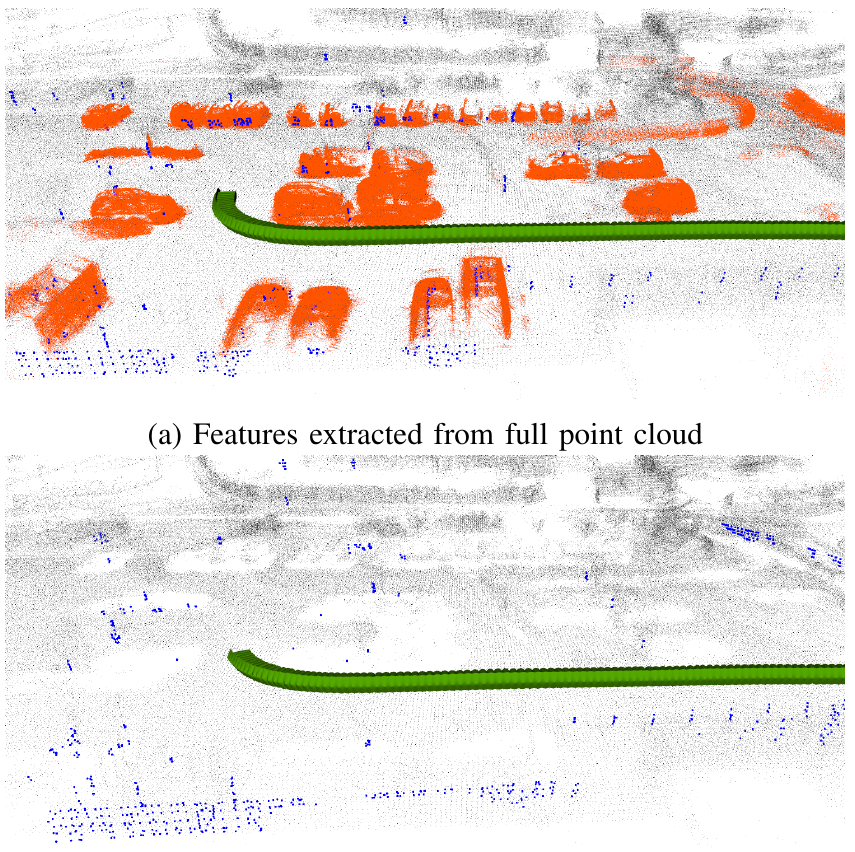
Comparison of the extracted features (blue) from the full point cloud and the one with removed movable objects respectively. By providing an unfiltered point cloud the feature extraction mechanism selects a vast amount of points from dynamic objects which can be compensated by applying our proposed movable object detection algorithm.
Experiments
To show the effectiveness of the proposed approach, we have recorded 7 different sequences of a cluttered and dynamic urban environment, i.e. a supermarket parking lot, on different days and at diverse hours. We show our re-localization capacities in this highly unsteady scenario using as GT-Map a recording from a different day, which would be useless if it were not for our approach, as it will not last more than the session for which it was created. In the paper we additionally show additional application of our approach for building a map through different days, which can also extrapolated to a multi-agent map building task.
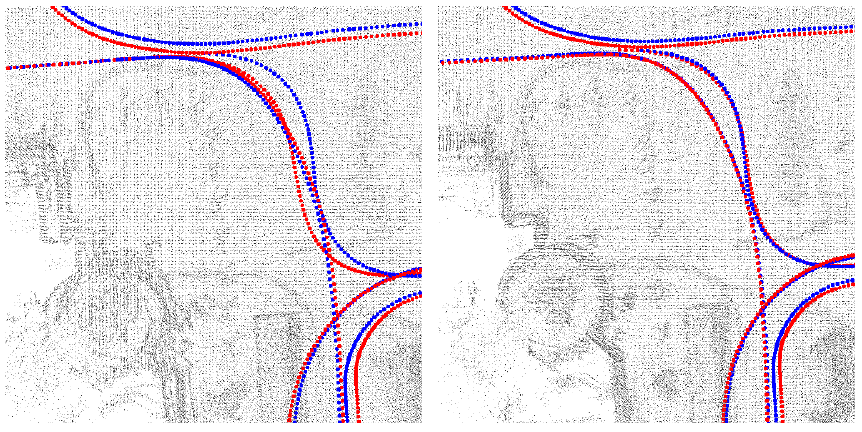
Qualitative results comparing the performances of ‘Reloc. Full’ and ‘Reloc. Filtered’ on the Map Extension experiment. In red we display the estimated trajectories along the days and in blue the ground truth. For ‘Reloc. Full’ the resulting map shows blurry and doubled map contents caused by drift from the ground truth due to incorrect feature matching which are clearly compensated by our approach.
Results
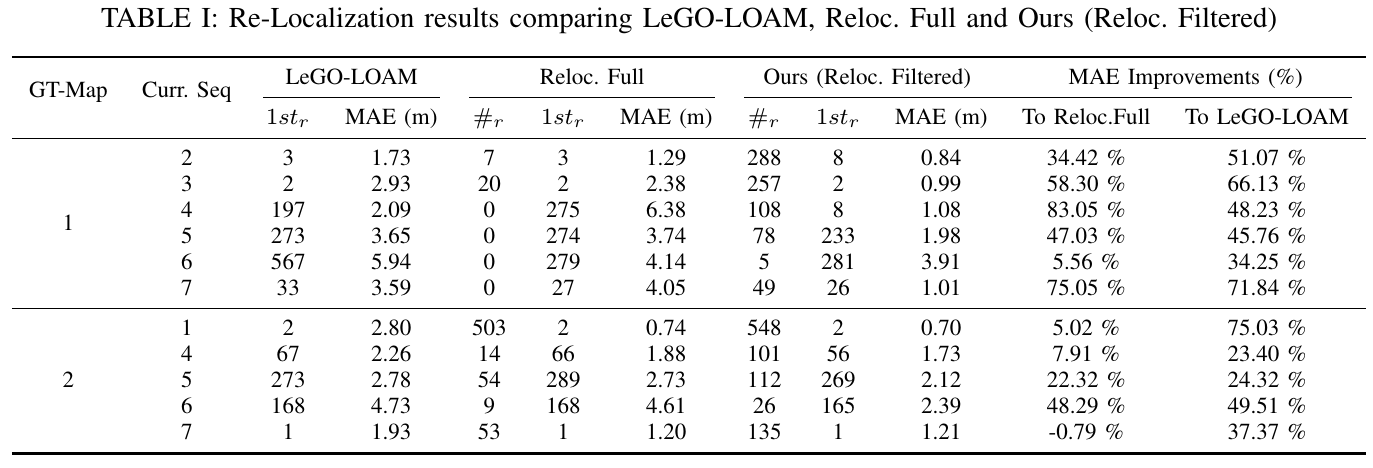
Re-Localization results comparing LeGO-LOAM, Reloc. Full and Ours (Reloc. Filtered).
